伺服系统应用得心应手
发布时间:2007-05-15 作者:Frank J. Bartos, P.E., Control Engineering 特约编辑
电气式伺服系统能够实现先进且精确的运动控制,因此越来越频繁地出现于多种工业级应用中。尤其在两种特殊的工作方式下,伺服系统性能奇佳,即快速点对点负载定位和各点之间平滑精确轨迹(包罗线)控制。
伺服运动系统作为一项成熟的技术,具有一个明显的特点:它拥有一套优选设计方案体系并附有应用指导,这为终端用户提供非常有价值的应用技巧以帮助他们完善系统。这些应用技巧涵盖了方方面面,从各种实战经验(包括惯性负载、合理接地屏蔽、电机的冷却等)到各类高级伺服整定算法,不一而足。其中特别提到了整定算法的应用技巧,因为伺服运动系统需要得到精确的整定以确保该系统能达到最高的精度及要求的动态特性。

图1:伺服运动系统所具备的高度动态的能力很好地满足多种应用需求,
例如CNC磨床。例如柴油输入泵汽缸盖的内外部移动就是采用Rexroth
数字伺服控制。
灵活利用应用技巧,成功缔造伺服系统。着眼于整个系统才能拥有合理的开局。
成套购买
Danaher Motion公司伺服技术总工程师George Ellis先生建议成套购买伺服系统,包括运动控制器、驱动和伺服电机等,因为这样能够避免如连线、配置、通信等方面的问题。单独购买各部件的所带来的一个问题就是连接顺序的复杂化,电机、驱动终端和反馈设备(包括编码器、分解器、霍耳传感器等)可以有多种不同的连接次序。George Ellis先生还指出随便更换电线很可能会造成电机停转或失控。同样地,驱动或控制器里有许多配置参数,只要其中一个出错就会导致整个系统运行不良,而(用户)还找不到明显的原因。而采用同一供应商的电机和驱动还有一个好处就是能更好的安装、调试软件,并确保其兼容性。
Control Engineering 产品研究调查报告对系统分析调查中发现,在某些个案中也可以单独购买伺服系统各部件。最新一次调查(2006年3月)表明71%的用户购买配套伺服驱动和电机,而另有12%的用户分别购买这些部件。Ellis先生补充说到成套购买伺服系统各部件能够确保系统运行更好、效率更高。
整定的重要性
“整定就是指设置若干增益系数(一般来说设置3到5个),使系统能够排除多余干扰产生迅速而稳定的响应的一个过程。”Ellis先生如是说。然而,整定伺服系统常常令人晕头转向,倒不是说整定有多复杂,而是这一过程要涉及一些陌生的理论。Ellis先生建议千万不要盲目进行整定,不要以为随随便便调整增益就能获得理想的响应。没有合理的整定方案,增益设置很可能会失控。他补充说伺服部件供应商会为用户提供整定程序,帮助用户整定系统,这样用户无需掌握高深的控制理论。
Baldor Electric公司伺服产品经理John Mazurkiewicz先生解释说现今伺服控制分为人工整定与自动整定。经验老道的工程师通常会使用人工整定,尽管这可能要花更多的时间。而使用自动整定时,他建议先进行无负载试运行,在用户熟悉控制操作、负载情况与负载位置后,再加入负载进行整定。一般的控制系统能够自动整定电流环和速率环,而Baldor推出的控制系统与众不同,它可以进行位置环整定,简化安装。整个自动整定过程只需10分钟就可大功告成。
前馈
仅仅依靠PID整定,伺服系统无法对大惯性负载进行精确加速和定位,在这样的情况下B&R Industrial Automation 公司建议(用户)可以考虑使用电流前馈的方法。这种方法也叫做惯性前馈法(IFF),通常还使用于以下一些情况:系统采用软驱动链(比如带有传输带或是长轴),间隙过大、需要高度摩擦、悬挂的负载,或者是带有凸轮弹簧装置的负载等。
“电流前馈法不像PID控制环产生必要的转矩,而是驱动每隔一段时间计算出适当的电流。”,B&R Industrial Automation公司运动控制专家Markus Sandhoefner先生说到,“为确保系统效率,电流前馈必须在驱动内部进行实时计算。电流进行前馈同时PID照旧进行整定,只不过不需要整定到最高的精度。”
所有的PID控制回路都会引入延迟误差,而IFF却恰恰相反。IFF能够显著地减少延迟误差(见惯性前馈图),有效地处理惯性较大的负载和其他复杂的负载。B&R公司将惯性前馈整定定为一个标准的面向用户的功能,并在Acopos系列伺服控制器中提供此功能。
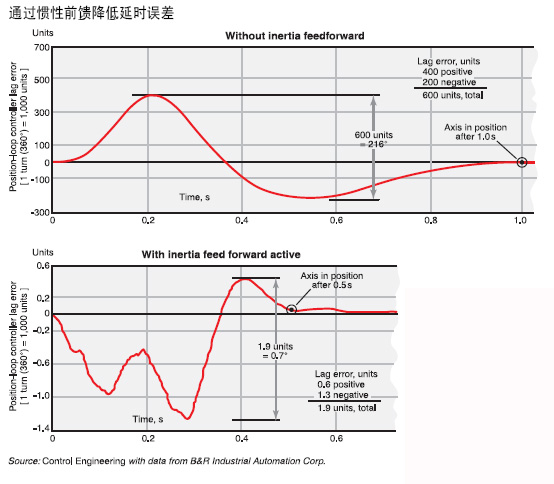
图2:B&R IndustrialAutomation的伺服控制器提供惯性前馈整定(IFF),
在高难度整定应用中能够有效地降低延时误差提高转矩运作,
确保运动轴快速定位,定位时间比原来缩减一半。
成熟的整定工具
GE Fanuc Automation公司伺服产品经理Paul Webster先生指出现在有很多伺服整定技术。而通常机床用户只要将默认参数载入伺服控制系统,而不按照具体情况进行整定。机器可能也运行良好,不用再做任何调整。他介绍说默认伺服设置适用于通用情况,能使系统保证基本系统运作。只要做一些基础的伺服整定就可以使机器运作效率倍增。
除了默认设置,Fanuc 0i-C系列低端控制器还具有“一键设置”功能,能够方便地进行高精度参数初始化设置,而高端的Fanuc CNC系列提供的基于PC软件也具备这种功能。Webster先生继续介绍说,提高伺服系统运行效率下一步就是根据波德图整定速率增益和谐振滤波器。Servo Guide就是一款不错的整定软件。
通过系统增益幅度(dB)和相角(deg.)对控制环路频响进行分析,波德图可以评估出伺服系统的稳定性。Webster先生提醒用户需要关注哪些重要指标,包括系统最大带宽(增益不变时的频率范围)、增益幅度为10dB时的频率值、频率衰减低于-20dB时的增益裕度。当波德图上无正频率峰值,频率衰减又低于-10dB,此时整定滤波器就能非常有效地消除谐振的影响。
GE Fanuc推出了与CNC配套的高级整定函数,帮助用户整定伺服系统,获得最佳运作效率。Webster先生告诉用户公司为他们准备的整定导航器方便实用,能够帮助用户顺利完成整定各个步骤。
Noteworthy是一个动态评估函数,能够自动减少CNC应用中产生的象限突起(或运动损失)现象。象限突起现象主要由系统内部的空隙引起的,这些空隙可能是机械部件之间的物理空隙也可能是系统具有弹性而造成,这种现象也叫wind-up。这两个明显的因素会引起运动损失,造成系统滞后,在圆形图上产生象限突起效应。(见“运动损耗”图)。
“我们利用“空隙加速”方法来消除象限突起现象,这种方法就是通过整定空隙数量并加入速率修正命令来消除造成运动损失的因素。”Webster先生如是说。动态整定是一个连续不断的过程,系统不断整定直到运动曲线达到精度为止。Webster先生又补充说一旦进入整定,整个系统整定过程就会自动进行。从某种意义上来说,CNC是基于系统初始误差整定的。
其他伺服系统供应商也为用户提供了不同的运动损失补偿方式。
不可忽略负载惯性
负载惯性与电机的惯性之间的比例系数也是一个重要的考虑因素。实际运用中有很多系数值可用,而Baldor Electric推荐了负载惯性与电机惯性之比不大于10:1这一经常被提到的系数。Mazurkiewicz先生解释说,可能某些工程师会建议采用更高的惯性系数,但不管如何关键是要降低“惯性失配”的概率同时又能降低整定的难度。
Bosch Rexroth也给用户类似的忠告,他们建议用户检查“驱动负载”的惯性大小。Bosch Rexroth高级应用工程师Brian Van Laar先生解释说负载惯性比电机惯性大许多的话,就很难进行快速的速度变化和定位了。在某些减速运动中,负载会反过来带动电机,引起过冲现象,致使稳定时间增长。为避免惯性失配,他们公司给出了若干“适配标准”:快速定位<2:1,修正定位<5:1,高速率变换<10:1。
Mazurkiewicz先生介绍说避免惯性失配的方法之一就是在允许的范围内提高齿轮比或滚珠间距,这样做能够减少负载惯性对电机的影响。选择电机的同时也要考虑选择适当的齿轮比和滚珠间距,当然也不能忘记考虑电机的大小。
而另一方面,适当的整定方法可以得到很高的惯性系数。Baldor公司就提到他们做过的一个项目,他们曾经为一台包装机的伺服系统做过人工整定,当时惯性系数高达144:1。他们一共花了6个小时才将系数整定到适合值。惯性失配值过高系统的响应就会减小。Control Engineering1997年9月刊曾刊登名为“Electric Servos Do More with Less”的文章,就几个高惯性负载应用实例进行过探讨。
安装电机注意事项
Baldor公司Mazurkiewicz先生提到了电机安装过程中常见的几个问题:
由于供电电压不足会导致电机运行速度不够。所以选择电机时,要确保10%的电压余量,以防低电压的情况;并检测电机两端电压。
由于低估负载重量或是发生去磁现象(系统带有磁铁时)会导致转矩过短。用万用表或示波器很容易能够检查出这种现象。启动电机,使其以一个测试速度运行,测量两端电压,然后启动另外一个电机以相同的速度运行,测试其两端电压。如果两次测得的电压值不同,则被测电机发生失磁现象。解决方法就是把电机送到制造商处重新磁化,并检查原因加以改正。
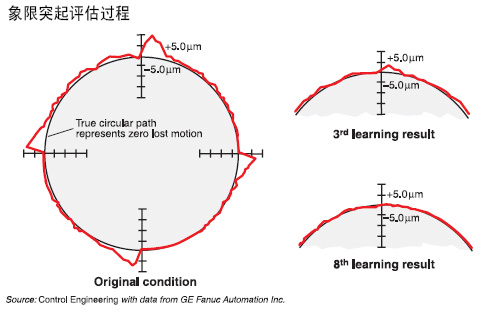
图3:GE Fanuc CNC 高级整定采用步进式评估方式以减少机器运动损失。
图示为一个二轴系统运作图,从图中不难看出最初的运动损耗(象限突起)
现象在第8 次评估中已被消除。
发生电机过热现象可能由于转矩过长,换句话说就是电机尺寸过小,还有就是可能出现了纹波电流(用示波器可以观察到)。Mazurkiewicz先生解释道整定不当或是反馈设备校正不当会引起纹波电流现象,他同时提醒用户不要用手试探电机的温度。尺寸合适的无刷伺服电机室温下的工作温度可达100℃~125℃!
关注电机反馈设备
检查分解器工作是否正常时,用欧姆表测量其阻值并检查电机连接是否正确。检查编码器:采用5V电源供电,检查信道A和信道B,用示波器观察在信号±A和±B之间是否有5V方波。不要让反馈设备的电线缠在一起。
一些机电控制则对反馈设备采取交替检查的方式。像是Baldor Seriers II驱动就具有“反馈出错提示”功能,可以检测是否遗失信号补偿并报错。

图4:Danaher Notion 推出的Kollmorgen S200 伺服
驱动和AKM伺服电机(包括附件)是一套完整的伺服
系统方案。它使用简单,能够各种满足特殊应用。
冷却电机=最佳运行 系统内部运行产生的热量会对电机有副作用。然而,直接驱动电机(循环和线性)也会产生热量对高精度机械产生影响,因为电机是物理集成在机械结构里面的。所以,直接驱动电机(DDM)优先考虑采用液体进行冷却。DDM通常用于高速金属切割机械中,比如激光切割机、木材作业机、桥式堆积机等。
Bosch Rexroth 自动化和机床品牌经理Karl Rapp先生建议用户选择冷却器要特别考虑到电机安装的数量、位置、负载和温度(最大、最小温度和环境温度)。冷却剂的压降也是一个重要的考虑因素。机电相对冷却泵的高度、冷却剂试管的直径以及冷却系统回路的总长都会对冷却剂压降产生影响。

图5:英国制造商 Unison TJP Electronics Ltd.弯管机采用Baldor 公司NextMove e100 软
件能够做到15 个运动轴同步运作,实现多步弯管操作同时进行。Baldor 无刷BSM系列伺
服电机控制每个弯头,伺服驱动具备制动整定功能。
Rapp先生说系统如果有多个电机,就必须采用多回路冷却器对每个电机进行冷却。利用传感器测出每个电机的冷却剂输出值以确保冷却剂的最佳流速。
冷却剂最好采用水溶性的或脂溶性的,但不能用自来水、工业用水。这些液体中的化合成分很可能会导致冷却剂回路不畅,电机过热造成停工停产。Rapp先生建议最好每月监测一次冷却剂的pH值,避免化学腐蚀和泄漏。他还补充到可以利用现成的温度、流量、压力、pH值传感器控制监测冷却系统,既简单方便又经济实惠。
多轴分解
伺服系统的运动轴越多,则系统的生产能力、精确性和灵活性就会下降。B&R Industrial Automation建议多轴系统使用分布式运动控制,既可以减轻系统负荷又能够简化伺服驱动与运动控制器间的通信。分布式运动控制可以运用到打印、包装、机器整理、流水线整合等方面。
集中式控制方式使用一个标准的控制器,比如说系统采用一个8轴或16轴的控制器,如果系统需要扩展至10或18轴,可以再添加第二个控制器。而分布式运动控制(DMC)则截然不同。B&R公司Sandhoefner先生解释说实际上,DMC使系统不再需要集中式运动控制器或CPU来进行计算,因为所有高速运动的计算都能在驱动的内部完成。而各运动控制器之间也无需保持高度同步。同时又简化接线。不过,逻辑功能和I/O系统仍然需要主集中式控制器支持。
他还补充说明,采用DMC,主控位能够连接到快速实时网络(比如Ethernet Powerlink)中,这样每个驱动都能够同时计算自己的相对位置。位置控制循环一旦重新设定,每个从属位只也会进行实时变化,当然也在驱动内部完成动作。所以,一台机器上安装了多少个轴都不会对运动控制系统的运作产生不良的影响。哪怕是机器全速运行时安装一个新的模块进来,也不会有太大的影响。
最后请提醒用户一点:运用伺服运动系统千万不可忽略制造商的相关资料以及他们的网站信息,这可都是很有价值的信息。
正确使用接地技巧、屏蔽技术,减少EMI
电磁干扰(EMI)会产生刺耳的噪音并造成误操作。Danaher Motion建议用户采用以下方法避免EMI:使用适合的屏蔽电缆,为长引线加装共模扼流线圈,电源信号与反馈信号分离等。Danaher Motion为提出一个“噪音检查表”,它主要采用8个步骤来避免电池干扰。“噪音检查表”作为一个独立的伺服元件供应给用户(请在线点击“更多详情”)。
Bosch Rexroth也越来越注重高频开关设备中的接地问题,比如伺服驱动中常用的IGBT。高级应用工程师Young Chon先生称:“由于伺服系统运作需要动态响应,所以采用高频切换(设备)是非常有利的,但同时它也可能产生更多的电子噪声。不过,机械使用者和终端用户可以通过伺服供应商提供的建议进行合理屏蔽接地,避免运作出错。”
翻译:朱俭华
更多信息,敬请访问一下网站:
www.baldor.com
www.boschrexroth-us.com
www.br-automation.com
www.cechina.com
www.danahermotion.com
www.gefanuc.com
www.unisonltd.com
文章编号:070401
发送短信“文章编号+ 评语代码”至13816124995,告诉我们您对此文的意见。
1- 很好,有很高的参考价值
2- 一般,有一定的参考价值
3- 不好,没有参考价值