缓冲罐液位控制回路的整定
发布时间:2014-06-03 作者:Lee Payne
大多数PID回路整定规则的目标是快速响应,即使IMC和Lambda规则对于缓冲罐控制回路来说也略显不足,所以我们需要一种能够应对这种应用的不同的策略。
如图1所示的缓冲罐,能够帮助吸收上游过程的流速变化,确保流向过程下游的流速变化没那么剧烈。为了完成这一目的,控制器必须允许液位上下变化,并且保证液位不会超过设定点。控制器的目标简单来说就是在确保输出变化最小的前提下保证缓冲罐的液位在上限和下限之间。
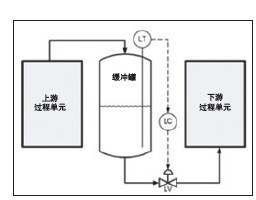
图1 典型缓冲罐配置下的液位控制回路。资料来源:Dataforth
液位稳定方法能够在扰动下最小化控制阀的运动,确保液位在上下限值之内,并在较长的时间内使液位回到设定点。整定规则描述了如何使用这种方法调整缓冲罐的液位,它的设计采用了一种非交互式控制器算法,其积分时间以分钟为单位设定,例如Dataforth 公司的MAQ20系统中的算法。
整定过程
整定控制器进行均匀液位控制,必须量化三个关键指标:
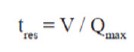
停留时间(tres):停留时间代表如果没有流入物质且保持输出阀门100%打开的时候罐体液位从100%降低到0%需要的时间。可以使用液位在0%和100%两处的容量差值(V)除以输出阀门的最大流速(Qmax):
V和Qmax所使用的单位必须保持一致,Qmax必须以容量/分钟来表示。
流速变化率(Δfmax):最大预期流速变化应该表示为最大阀门容量的百分比。可以使用阀门位置的历史变化趋势用于发现最大在相对较短的时间范畴内控制器输出的最大变化。
距离设定点的最大偏差(ΔLmax):最大允许液位偏差应该表示为全部偏差的百分比。
一旦这三个参数能够确定,控制器的整定参数就可以计算出来:
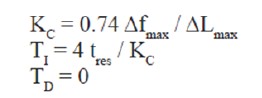
KC表示控制器增益,TI是以分钟为单位的积分时间,TD是偏离时间。基于这种均匀液位整定规则的典型缓冲罐整定响应如图2所示。

图2 缓冲罐控制回路在采用均匀液位控制方法后对扰动的响应如图所示,该方法采用了非交互式控制器算法,其积分时间以分钟为单位。
Ziegler-Nichols和大多数其他的液位控制器的整定方法并不适用于缓冲罐,而均匀液位的整定规则却能够确保缓冲罐液位在上下限之间,同时还能够保证控制器的输出变化最小。